// 01
// Aerospace · Lunar Exploration
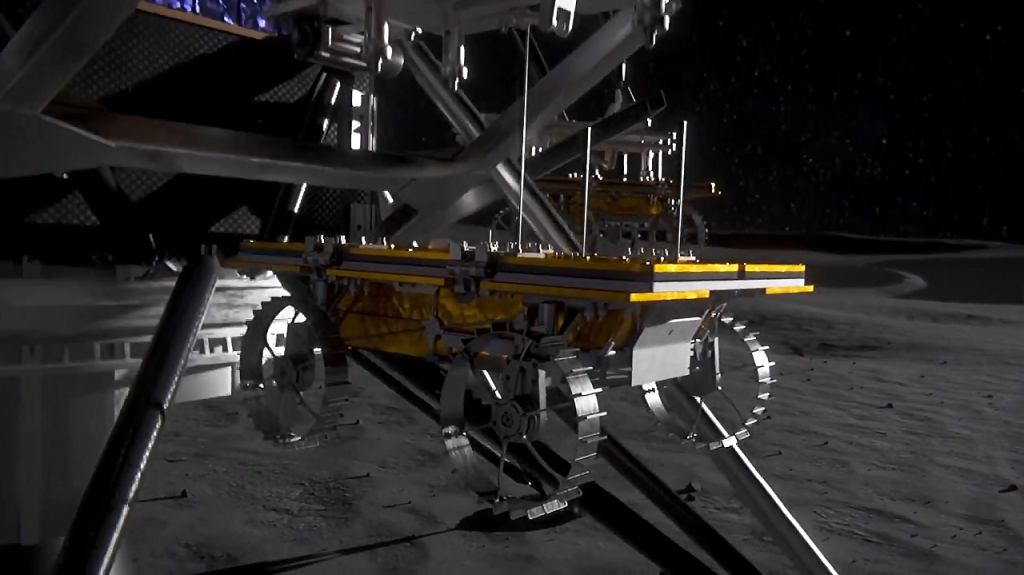
NASA · CADRE
Three autonomous rovers exploring the Moon without a human in the loop.
Hover for the numbers →// NASA · CADRE
Cooperative autonomy, engineered for the lunar surface.
Geisel developed the deployment software that lowers three autonomous rovers from their lander, plus the ground-control interface for the ground-penetrating radar aboard each rover.
3Autonomous rovers
237°FMidday lunar temp
33 ftGPR subsurface reach

