// 01
// Aerospace · Lunar Exploration
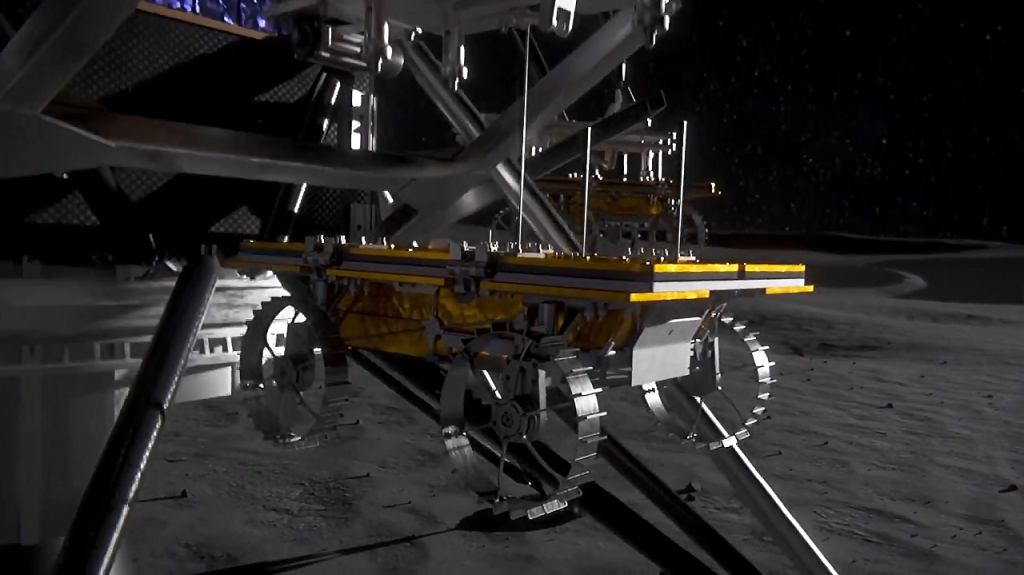
NASA · CADRE
Multi-rover autonomous coordination on the lunar surface, no human in the loop.
Hover for the numbers →// NASA · CADRE
On-device autonomy at lunar distance.
A fleet of small rovers operating as a coordinated team, making decisions on-device, in real time, without a round-trip to Earth. Geisel built the deployment software and the ground-control interface for the GPR aboard each rover.
3Autonomous rovers
237°FMidday lunar temp
33 ftGPR subsurface reach