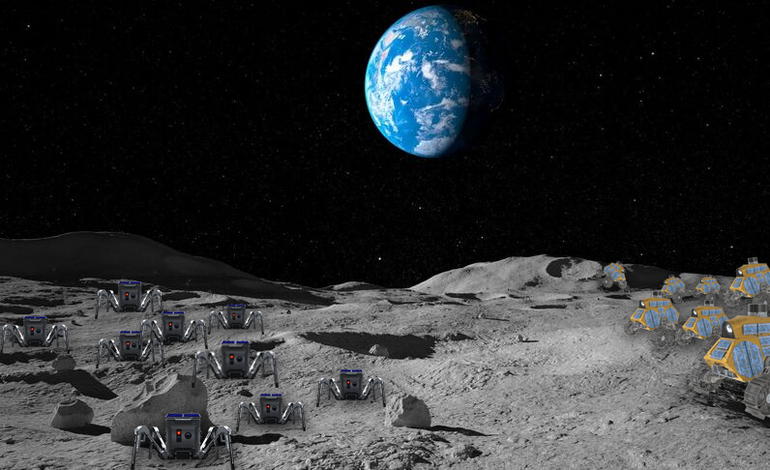
NASA needed high-fidelity training data to help autonomous rovers navigate Mars. That data couldn’t be collected in the real world. So we built physics-based simulations that generate photorealistic terrain imagery with ground truth built in. That technology became Symage.
Today, Symage generates high-fidelity synthetic image, document, and tabular data with deterministic ground truth built directly into the generation process. Not inferred after the fact. The result: pixel-perfect labels, coherent data relationships, and production-grade training data. Eliminate manual labeling, reduce compliance risk, and cover the edge cases reality rarely provides.
Engineered data. Not AI’s best guess.