// 01, The Mission
Can a team of robots divide work and explore without waiting for Earth?
NASA’s CADRE project is built around a question that matters for every future deep space mission: can a team of robots divide work, make decisions, and carry out an exploration mission without waiting for instructions from Earth?
Three suitcase-sized rovers will cooperate autonomously on the lunar surface, electing a leader, distributing tasks, and executing a mission with only a single high-level directive from mission controllers. “The only instruction is, for example, ‘Go explore this region,’ and the rovers figure out everything else: when they’ll do the driving, what path they’ll take, how they’ll maneuver around local hazards.”
CADRE will launch aboard Intuitive Machines’ IM-3 Nova-C lander, headed for the Reiner Gamma region. Hardware construction was completed and the rovers shipped to Intuitive Machines’ Houston facility in early 2025. Launch is scheduled for the second half of 2026.
If it works, it changes how space agencies think about robotic exploration. The question stops being “what can one rover do?” and starts being “how many do we send, and what will they do together?”
// 02, The Problem
Getting three robots to the surface of the Moon is the prerequisite for everything else.
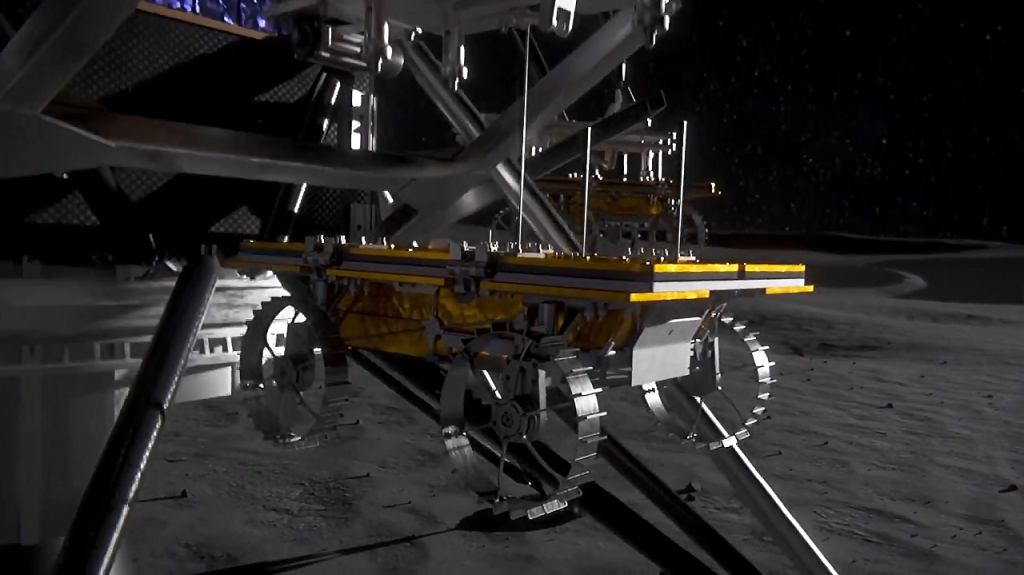
Before the rovers can explore anything, they have to get there. Each rover is lowered from the lander to the lunar surface via tether, a deployment sequence that has to execute correctly, at a place where you can’t test the actual conditions in advance.
The Moon’s gravity is one-sixth of Earth’s. Its surface has no atmosphere. The communication delay between Earth and the Moon means ground control can monitor and command, but cannot intervene in real time. Every decision about pacing, sequencing, and safety has to be engineered into the software before the mission launches.
And the deployment only happens once.
// 03, What Geisel Built
Two software systems, each addressing a different phase of the mission.
Geisel Software was brought onto the CADRE team by NASA to develop two distinct software systems.
Autonomous Deployment Software for Safety-Critical Lunar Surface Operations
Geisel developed the software that gives ground control the ability to command the release of all three rovers from the base station and manage their lowering to the lunar surface. The deployment sequence is designed to be deliberate, paced to give ground controllers on Earth time to send commands, receive telemetry, and make careful decisions before each step. That pacing isn’t caution for its own sake. It’s the only way to maintain meaningful human oversight across a communication link that doesn’t allow for instant response.
The challenge that can’t be solved by testing alone is the lunar environment itself. Near the Moon’s equator, where the CADRE rovers will land, midday temperatures can reach 237 degrees Fahrenheit. The reduced gravity affects how the rovers descend and settle. The absence of atmosphere removes the thermal and protective buffers that Earth-based testing relies on. The software had to be built to handle conditions that ground tests can only approximate.
Ground Control Interface for Ground-Penetrating Radar Across Three Rovers
After completing the deployment software, Geisel’s team shifted focus to a second contribution: developing the interface between ground control and the ground-penetrating radar (GPR) hardware installed on each of the three rovers. The GPR can provide a view as far as 33 feet into the lunar subsurface, enabling the study of subsurface geology, detection of underground cavities, and the potential location of water ice deposits.
What makes this scientifically significant is that all three rovers carry the hardware. Taking simultaneous GPR readings from multiple locations produces a picture of the subsurface that no single rover could generate. Geisel’s interface work connects that hardware capability to the humans on Earth who need to task it, monitor it, and make sense of what it finds.
// 04, Why It Matters Beyond CADRE
Autonomous exploration where humans can’t go.
CADRE is a technology demonstration, but what it’s demonstrating has direct implications for every ambitious mission that comes after it. Autonomous multi-robot coordination, deployment in environments humans can’t reach, distributed sensing across a rover fleet, these are the building blocks of how planetary science gets done when the distances involved make human control impractical.
Three robots. No human controllers. A mission that only works if the software does. CADRE isn’t just testing whether rovers can cooperate on the Moon, it’s testing whether autonomous systems can be trusted to operate where humans can’t go. Geisel builds for that standard.
NASA CADRE · Cooperative Autonomous Distributed Robotic Exploration